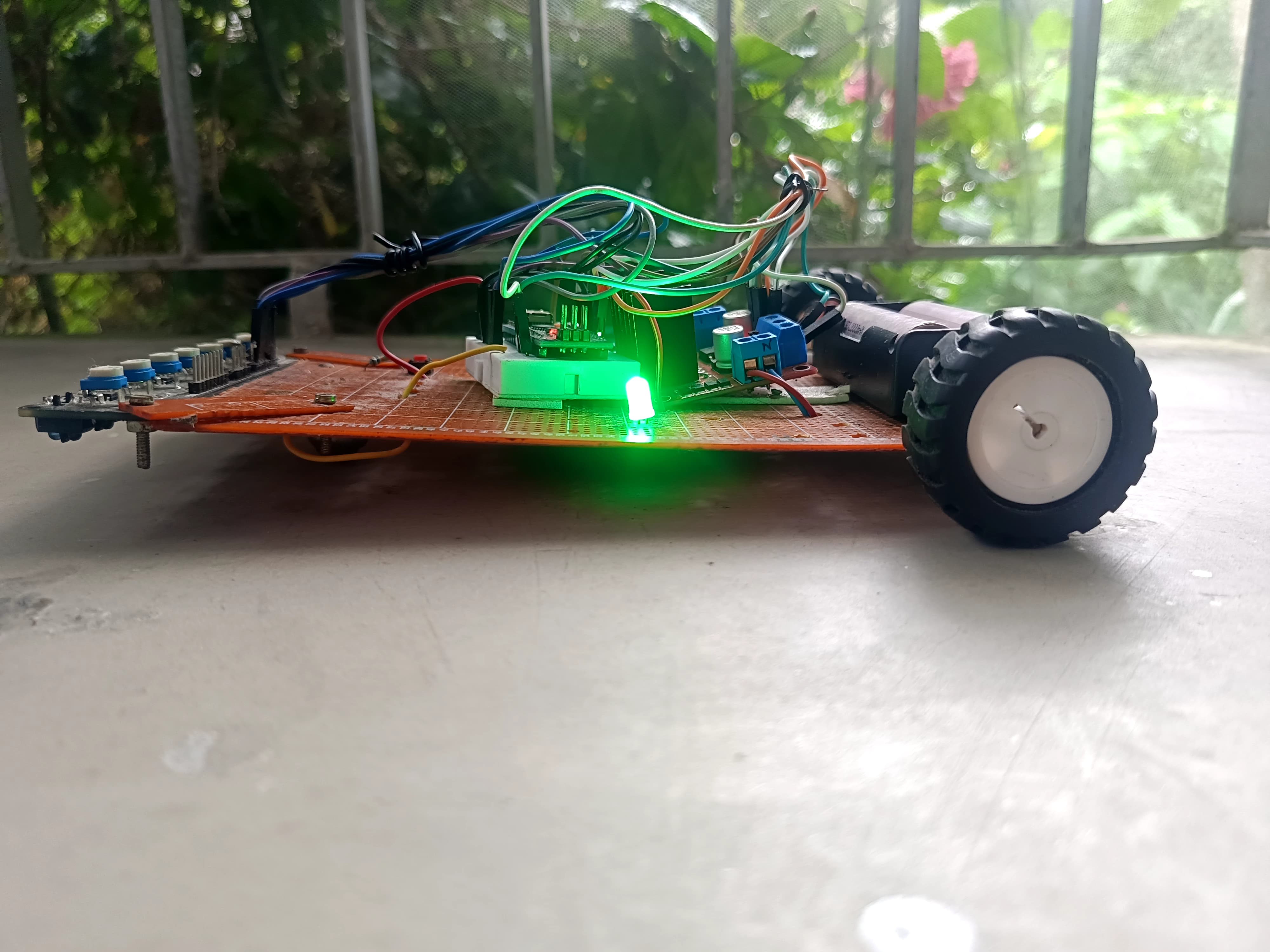
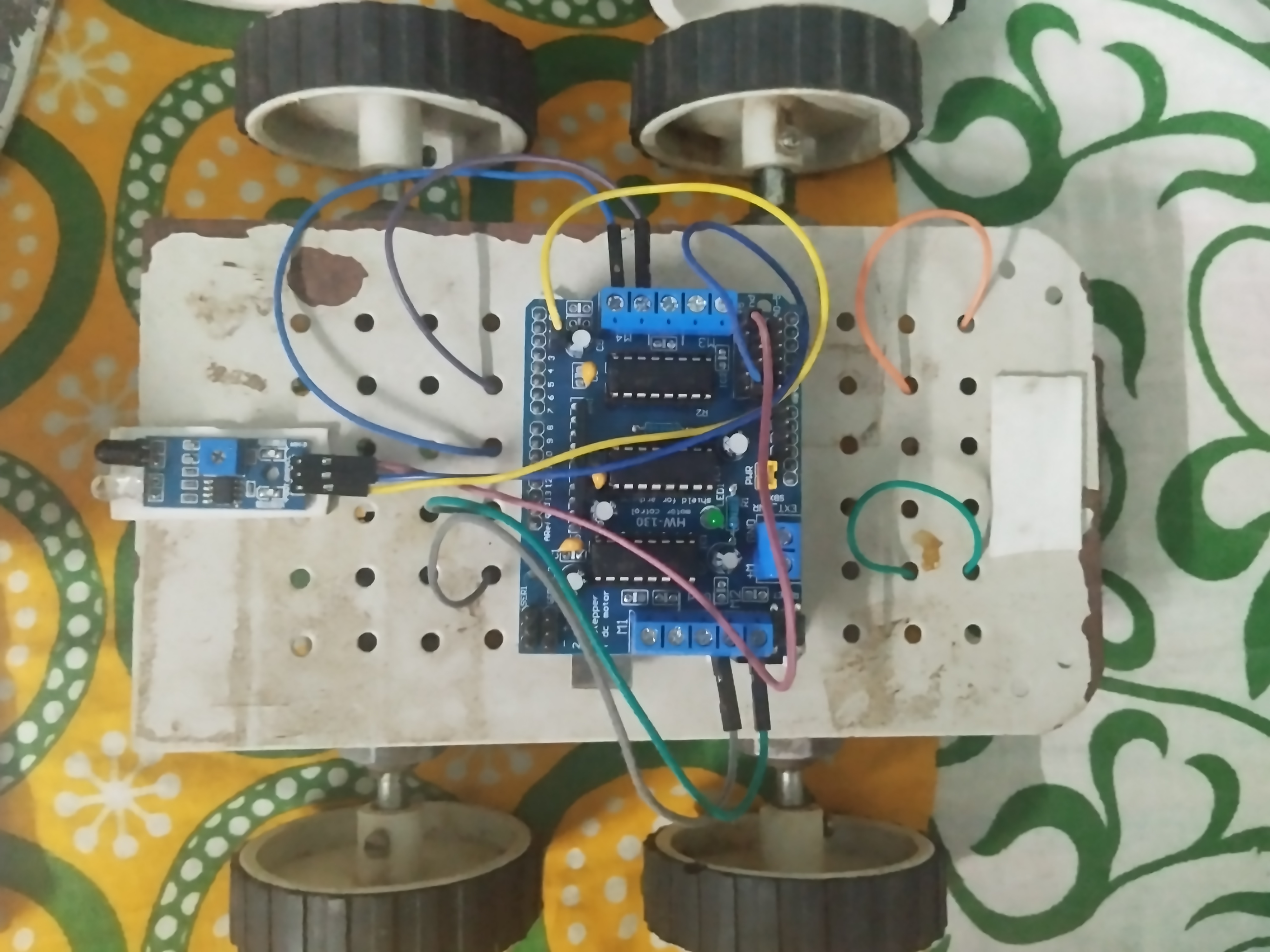
Phase I: 4-Wheeler Automation
The 4-Wheeler track focuses on large-scale urban mobility. By integrating high-precision LIDAR and Computer Vision, the vehicle builds real-time 3D maps of its surroundings and plans optimal paths forward.
- Advanced obstacle detection and avoidance system
- Precise navigation using LIDAR and Computer Vision
- Real-time traffic analysis and route optimization
- Emergency braking and collision prevention
- Intelligent speed adaptation systems